|
|

|

|
| e-Pub |
Section: New Results
New results
Inverse model with contact handling
Publication in RA-Letter 2017 (proceeding ICRA 2017): Optimization-based inverse model of soft robots with contact handling, E. Coevoet, A. Escande, C. Duriez. Abstract. This paper presents a physically-based algorithm to interactively simulate and control the motion of soft robots interacting with their environment. We use the Finite Element Method (FEM) to simulate the non-linear deformation of the soft structure, its actuators, and surroundings, and propose a control method relying on a quadratic optimization to find the inverse of the model. The novelty of this work is that the deformations due to contacts, including self-collisions, are taken into account in the optimization process. We propose a dedicated and efficient solver to handle the linear complementarity constraints introduced by the contacts. Thus, the method allows interactive transfer of the motion of soft robots from their task space to their actuator space while interacting with their surrounding. The method is generic and tested on several numerical examples and on a real cable-driven soft robot. http://hal.univ-lille3.fr/hal-01500912
|

Hydraulic actuators
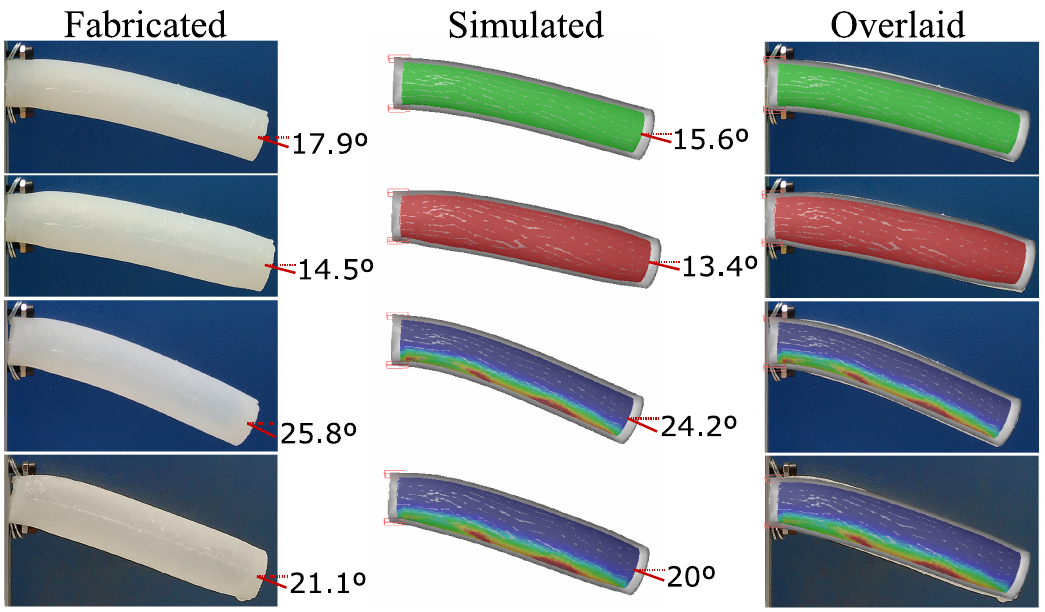
Publication at ICRA 2017: Real-time simulation of hydraulic components for interactive control of soft robots, A. Rodrìguez, E. Coevoet, C. Duriez. Abstract. In this work we propose a new method for online motion planning in the task-space for hydraulic actuated soft robots. Our solution relies on the interactive resolution of an inverse kinematics problem, that takes into account the properties (mass, stiffness) of the deformable material used to build the robot. An accurate modeling of the mechanical behavior of hydraulic components is based on a novel GPU parallel method for the real-time computation of fluid weight distribution. The efficiency of the method is further increased by a novel GPU parallel leveraging mechanism. Our complete solution has been integrated within the open-source SOFA framework. In our results, we validate our simulation with a fabricated silicone cylinder and we demonstrate the usage of our approach for direct control of hydraulic soft robots. https://hal.inria.fr/hal-01535810
Visual Servoing Control of Soft Robots
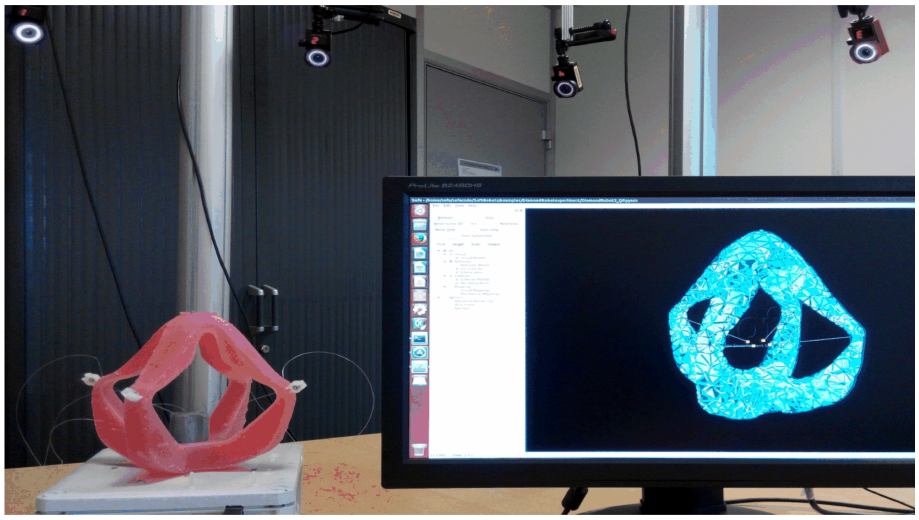
Publication at IROS 2017: Visual Servoing Control of Soft Robots based on Finite Element Model, Zhongkai Zhang, Thor Morales Bieze, Jeremie Dequidt, Alexandre Kruszewski, Christian Duriez. Abstract. In this paper, we propose a strategy for the control of soft robots with visual tracking and simulation-based predictor. A kinematic model of soft robots is obtained thanks to the Finite Element Method (FEM) computed in real-time. The FEM allows to obtain a prediction of the Jacobian matrix of the robot. This allows a first control of the robot, in the actuator space. Then, a second control strategy based on the feedback of infrared cameras is developed to obtain a correction of the effector position. The robust stability of this closed-loop system is obtained based on Lyapunov stability theory. Otherwise, to deal with the problem of image features (the marker points placed on the end effector of soft robot) loss, a switched control strategy is proposed to combine both the open-loop controller and the closed-loop controller. Finally, experiments on a parallel soft robot driven by four cables are conducted and show the effectiveness of these methods for the real-time control of soft robots. https://hal.inria.fr/hal-01618330
|
Dynamic control of soft robots
Simulation results have been presented at the International Federation of Automatic Control (IFAC) World Congress in Toulouse in July. We presented a control strategy build on a reduced order dynamical model of a soft robot and showed that it allows the user to make the studied soft robot converge faster to a desired position without oscillations. This paper was illustrated with simulation experiments. https://hal.archives-ouvertes.fr/hal-01558844/
Framework for soft robot simulation
Publication in Advanced Robotics 2017: Software toolkit for modeling, simulation and control of soft robots, E. Coevoet, T. Morales-Bieze, F. Largilliere, Z. Zhang, M. Thieffry, M. Sanz-Lopez, B. Carrez, D. Marchal, O. Goury, J. Dequidt, C. Duriez. Abstract. The technological differences between traditional robotics and soft robotics have an impact on all of the modeling tools generally in use, including direct kinematics and inverse models, Jacobians, and dynamics. Due to the lack of precise modeling and control methods for soft robots, the promising concepts of using such design for complex applications (medicine, assistance, domestic robotics...) cannot be practically implemented. This paper presents a first unified software framework dedicated to modeling, simulation and control of soft robots. The framework relies on continuum mechanics for modeling the robotic parts and boundary conditions like actuators or contacts using a unified representation based on Lagrange multipliers. It enables the digital robot to be simulated in its environment using a direct model. The model can also be inverted online using an optimization-based method which allows to control the physical robots in the task space. To demonstrate the effectiveness of the approach, we present various soft robots scenarios including ones where the robot is interacting with its environment. The software has been built on top of SOFA, an open-source framework for deformable online simulation and is available at https://project.inria.fr/softrobot/. https://hal.inria.fr/hal-01649355
Shape modelling and optimization
Thomas Morzadec and Erwan Douaille are working on new approaches to model the soft robots' shape. They are working under the supervision of Damien Marchal and Christian Duriez. During this year, they developped a modelling kernel based on distance field function and integrate it into Sofa. The geometrical representation offer several interesting properties that are: compactness and generative. For usability the distance functions are described using the python language then transpiled into more efficient languages (glsl and cython). This geometric kernel is planned for integration into Sofa. On top of this framework shape optimization are now investigated using genetic algorithms.